投影聚类法
Basic Conceprions
- 投影聚类:考虑一些多维空间中的一组数据点。 投影聚类是数据点的子集C以及维度的子集p,使得C中的点紧密地聚集在维度V的子空间中。
基本符号定义
- N:数据点的数量
- $C = \{x_1,x_2,…,x_t\}$是在一个类中数据点的集合
- cluster C的中心点定义为: $\bar{x}_c = \sum^t_{i=1} x_i/t$
- 定义一个类的半径radius为 一个点到类中心点的平均距离 $\bar{x}_c = \sum^t_{i=1} d(\bar{x}_c,x_i)/t$
算法介绍
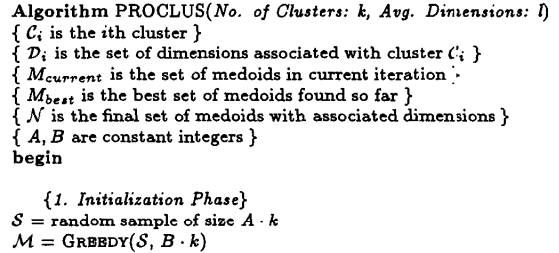
算法分为三个部分: 初始化阶段(initialization phase);迭代阶段(iteration phase);类别调整阶段(cluster refinement phase)
初始化阶段:使用Greedy method
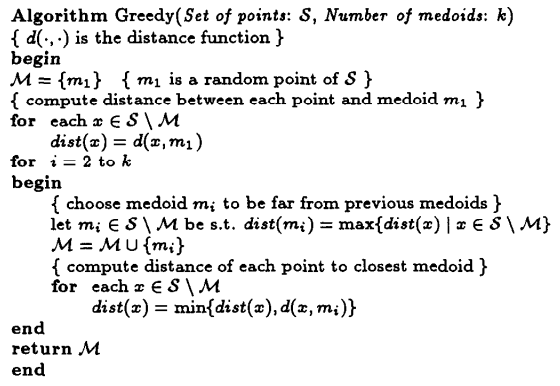
首先从数据集中随机确定一个中心点,加入M,然后计算其他每一个点到M中所有中心点中最近的距离,然后取距离最大的点作为下一个中心点加入M,重新计算剩余点到M中所有中心点中最近的距离,依次迭代下去,直到得到满足个数的集合M
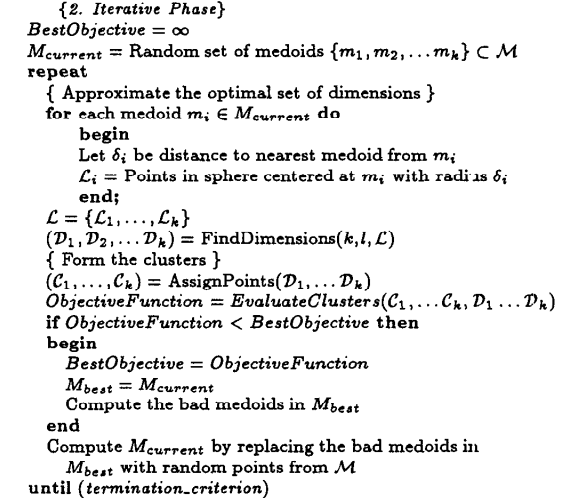
迭代阶段:
(1)首先从集合M中选择k个作为初始的中心点,然后重复(2)-(6)
(2)对于M中的每一个中心点$m_i$:
$\delta_i$是$m_i$距离$m_i$最近的中心点的距离
$L_i$是以$m_i$为圆心,$\delta_i$为半径中包含的点的集合
$L = \{L_1,…,L_k\}$
(3)为集合中每一个中心点找到与之相关的维度,l最少为2(D = FindDimensions(k,l,L))
(4)通过找到的维度将所有点按照距离来进行分类,((C1,…,Ck) = AssignPoints(D1,…,Dk))
(5)通过分类和维度来计算目标函数;如果比目前最好的目标函数还要好,就记录下中心点的分类和当前目标函数的值。
(6)从当前中心点中找到最坏的一些中心点,然后去除掉之后,从M中重新加入一些点来构成新的集合
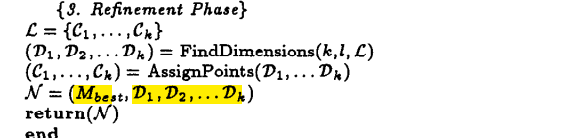
聚类改进阶段(refinement phase)
算法细节
FindDimensions(k,l,L):
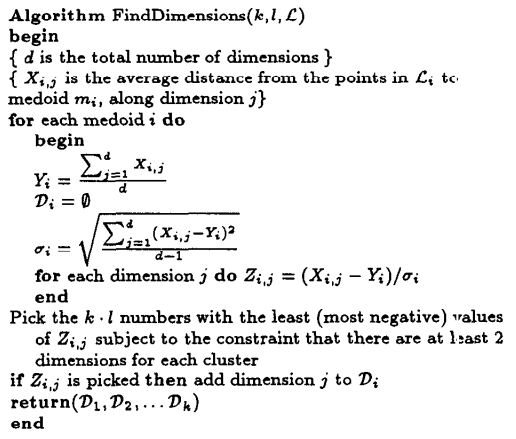
其中 $X_{ij}$为$L_i$中的点到中心点$m_i$在维度j上的距离
$Y_i$为对第i个中心点来说,对应的$L_i$到中心点$m_i$上所有维度的平均距离
而后计算标准偏差$\sigma_i$,就可以得到一个为每一个维度进行一个归一化的评价
为$Z_{ij} = (X_{ij}-Y_i)/\sigma_i$
对于每一个中心点$m_i$对应的$Z_{ij}$,选择最小的l个并将这l个记录在$D_i$中,最终返回$D = \{D_1,D_2,…,D_k\}$
AssignPoints函数:
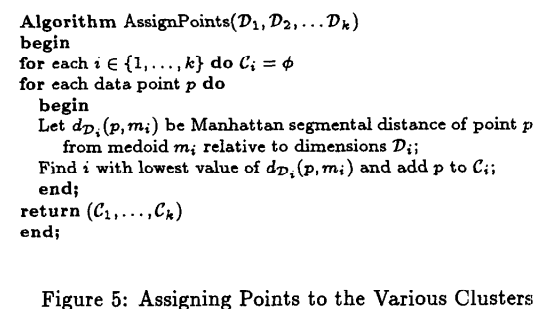
注意计算的是曼哈顿距离(街区距离)
选取距离最小的作为某分类(其规则是关于$D_i$的维度上)中的点
evaluateClusters函数:
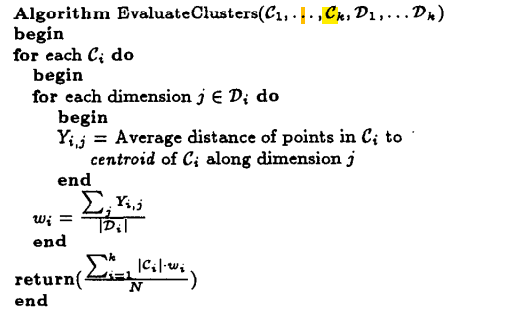
评估一组中心点的质量,从点到它们所属的cluster的质心的曼哈顿距离的平均值作为评价标准
丢弃:首先确定哪些是坏的中心点:
- (1)周围有最少点的中心点是坏的中心点
- (2)若中心点周围的点数比$\frac{N}{k}*minDeviation$少,那么他是坏的中心点,mindDeviation是一个小于1的常数(一般用0.1)
聚类改进阶段:再进行(2)-(4)一次,唯一不同的是此次用C而不是用L
此算法的Python代码,写的很规范,完全是根据paper的流程写的,非常清晰。
