Neural Controlled Differential Equations for Irregular Time Series
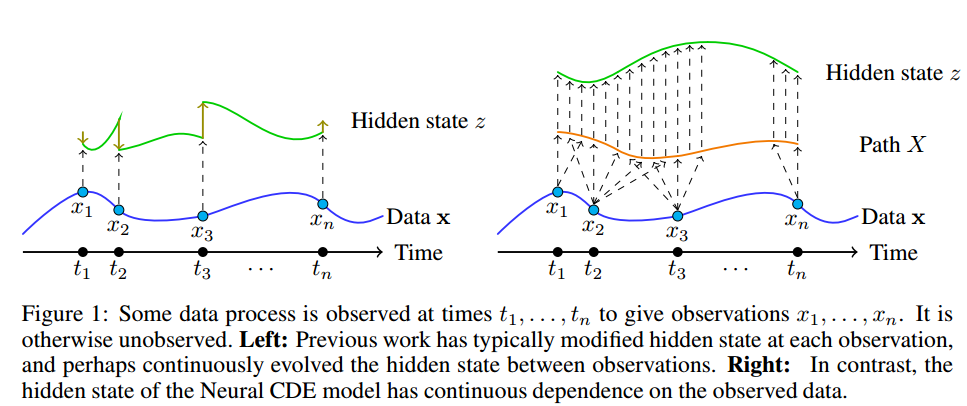
Neural ODE的缺点是一旦初值确定,轨迹便确定,中间无法对轨迹进行修正,本文引入受控微分方程概念,使得后续拿到的数据得到进一步利用。ArXiv, code.
假设$\tau, T\in R$, 且$\tau <T$, $v,\omega$为正整数, $X:[\tau, T]\rightarrow R^v$为一个有界连续函数(即X是满足Lipschitz性质的)。$f:R^\omega \rightarrow R^{\omega\times v}$是连续映射函数,$\zeta\in R^\omega$, 且有连续映射 $z:[\tau, T]\rightarrow R^{\omega\times v}$, 并定义
其中 $X_s\in R^v, f(Z_s)\in R^{\omega \times v}$, 上式被称作 $\text{Controlled differential equation}$.
与一般基于ODE的时序预测方法不同,本文在考虑后续状态的同时,可以保证隐藏状态z是连续变化的。
对(1)式进行扩展,可以得到$\text{Neural Controlled Differenrial Equations}$的定义为:
其中$z_{t_0} = \zeta_{\theta}(x_0, t_0)$
- 本文中$X:[\tau, T]\rightarrow R^v$是通过自然边界下三次样条插值法来确定的
- $f_{\theta}:R^\omega \rightarrow R^{\omega\times (v+1)}$表示任意神经网络,$w$是超参数,表示隐藏状态的维度
- $\zeta_{\theta}: R^{v+1}\rightarrow R^{\omega}$表示任意依赖于参数$\theta$的神经网络
本文将 $\text{Controlled differential equation}$转化为普通的ODE方程,从而能够通过$\text{Neural ODE}$中的方法进行求解,假设
则很容易得到